注意
转到结尾 下载完整的示例代码。
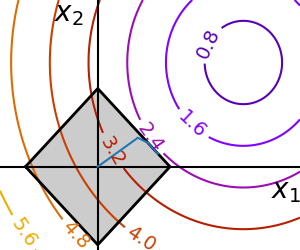
2.7.4.6. 约束优化¶
一个展示如何使用 SLSQP 和 cobyla 进行一般约束优化示例。
import numpy as np
import matplotlib.pyplot as plt
import scipy as sp
x, y = np.mgrid[-2.03:4.2:0.04, -1.6:3.2:0.04] # type: ignore[misc]
x = x.T
y = y.T
plt.figure(1, figsize=(3, 2.5))
plt.clf()
plt.axes((0, 0, 1, 1))
contours = plt.contour(
np.sqrt((x - 3) ** 2 + (y - 2) ** 2),
extent=[-2.03, 4.2, -1.6, 3.2],
cmap="gnuplot",
)
plt.clabel(contours, inline=1, fmt="%1.1f", fontsize=14)
plt.plot([-1.5, 0, 1.5, 0, -1.5], [0, 1.5, 0, -1.5, 0], "k", linewidth=2)
plt.fill_between([-1.5, 0, 1.5], [0, -1.5, 0], [0, 1.5, 0], color=".8")
plt.axvline(0, color="k")
plt.axhline(0, color="k")
plt.text(-0.9, 2.8, "$x_2$", size=20)
plt.text(3.6, -0.6, "$x_1$", size=20)
plt.axis("tight")
plt.axis("off")
# And now plot the optimization path
accumulator = []
def f(x):
# Store the list of function calls
accumulator.append(x)
return np.sqrt((x[0] - 3) ** 2 + (x[1] - 2) ** 2)
def constraint(x):
return np.atleast_1d(1.5 - np.sum(np.abs(x)))
sp.optimize.minimize(
f, np.array([0, 0]), method="SLSQP", constraints={"fun": constraint, "type": "ineq"}
)
accumulated = np.array(accumulator)
plt.plot(accumulated[:, 0], accumulated[:, 1])
plt.show()
脚本总运行时间:(0 分 0.048 秒)